
Description
This tiny breakout board for TI’s DRV8801 offers a modern alternative to classic motor drivers like the L293D, SN754410, and L298N. It can deliver a continuous 1 A (2.8 A peak) to a single motor and offers a wide operating voltage range of 8 V to 36 V. The DRV8801 features a simple two-pin speed/direction interface, current-sense feedback, and integrated protection against undervoltage, overcurrent, and overtemperature.
Features:
- Drives a single brushed DC motor
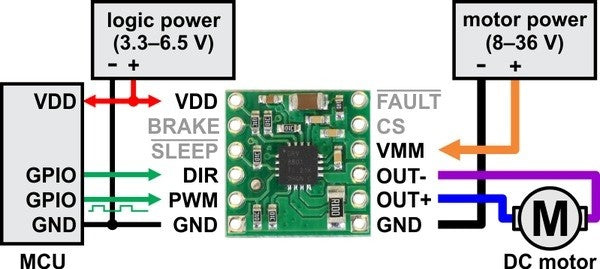
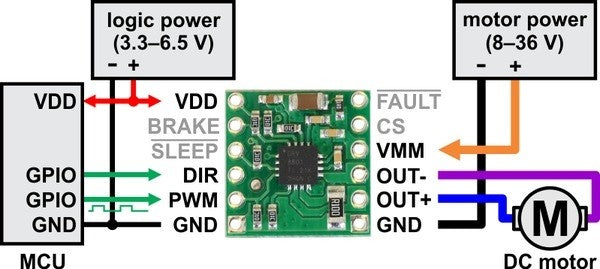
- Motor supply voltage: 8 V to 36 V
- Logic voltage: 3.3 V to 6.5 V
- Output current: 1 A continuous (2.8 A peak)
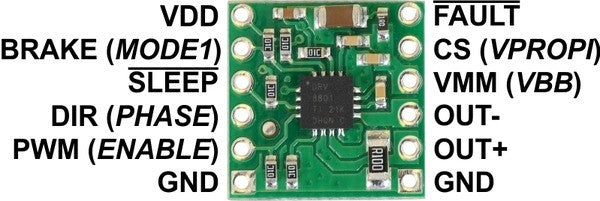
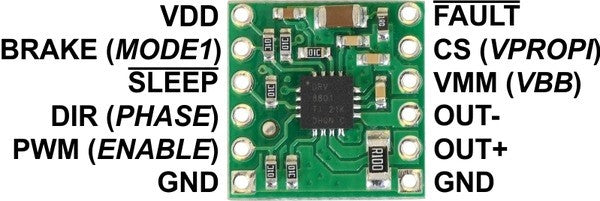
- Simple interface requires only two I/O lines (one for direction and one for speed)
- Current sense output proportional to motor current (approx. 500 mV per A)
- Inputs are 3V- and 5V-compatible
- Undervoltage lockout and protection against overcurrent and overtemperature
Specifications:
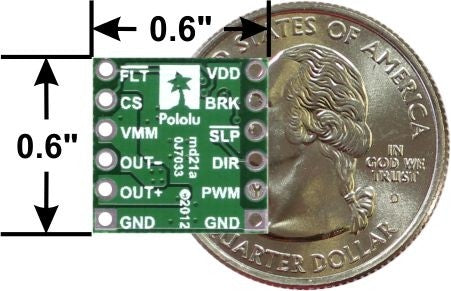
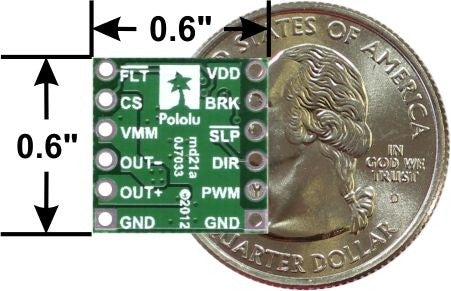
- Dimensions: 0.6″ x 0.6″
- Weight: 0.7 g
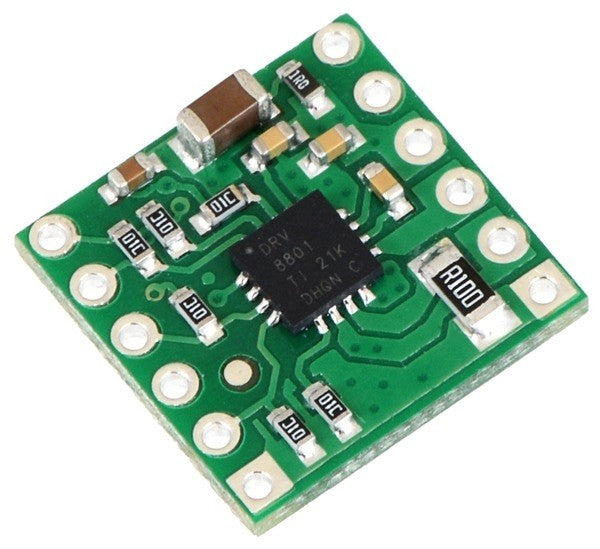
- Motor driver: DRV8801
- Motor channels: 1
- Minimum operating voltage: 8.0 V
- Maximum operating voltage: 36 V
- Continuous output current per channel: 1 A
- Peak output current per channel: 2.8 A
- Current sensing: 0.5 V/A
- Reverse voltage protection?: No
Documents:
Encrypted payment
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.
Customs tariff number:
Country of origin:
This depends on where you are located. Once the order has been handed over to UPS, the delivery time in Germany is approx. 2-3 days, within Europe approx. 1 week.
We dispatch our articles with our shipping partner UPS.
If we have not yet answered your question, you can contact us and we will get back to you as soon as possible.