With the help of distance and proximity sensing you can determine the location of objects without physical contact. In the field of electronics, for example in the Arduino environment, so-called distance sensors are used for this purpose.
How does a distance sensor work?
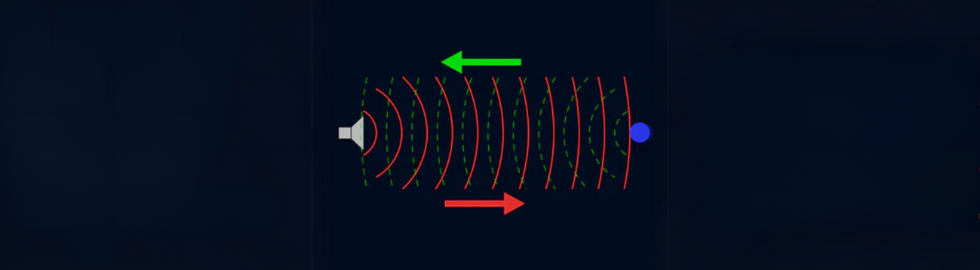
Distance sensors or proximity sensors generally work by emitting a signal (e.g. laser, IR LED, ultrasonic wave) and then detecting how the signal has changed. This change can be read in the intensity of the returned signal or, for example, the time it takes for the signal to return.

What role do interface options play in sensor selection?
Many factors play a role in deciding which interface option is best for a distance sensor project.
The first is usually what type of sensor your project requires. Can you use an ultrasonic rangefinder, or do you need to measure distances greater than 20 meters? This can make the interface decision for you.
However, if you are presented with multiple options, consider how many sensors you need and how many pins are available. I2C uses two pins on your board even if you use multiple sensors (with different addresses), whereas SPI sensors each need their own pin.
Other considerations include things like power consumption, speed, wire length from the board to the sensor, and whether or not verification of received data is required.
Distance measurement technologies
There are many options to choose from when integrating a distance sensor or proximity sensor into your project.
We will primarily focus on four different distance sensors or technologies:
- LED
- LiDAR
- Ultrasonic
- VCSEL
Each option has its pros and cons, and we have guides, projects, and tools to make sure you know which one is right for you!
| LED | LIDAR | Ultrasound | VCSEL |
 |
|
|
 |
| Inexpensive, small footprint, good update rate, multiple interface options. | Very good maximum range, very fast update rate | Very low power consumption, multiple interface options | Very small minimum range, wide input voltage range, very fine resolution, low cost |
 |
|
|
 |
| Power consumption somewhat high, maximum range relatively low | High power consumption, expensive, large footprint | Low resolution, slow update rate | Very small maximum range, only I2C interface |
Comparison of different distance sensors
For the comparison of the different sensors, some terminology should be clarified in advance:
- Resolution: refers to the smallest change in distance that a sensor can detect. For example, an IR LED can have a resolution of about 5 mm, while a VCSEL unit can have a resolution of about 1 mm.
- Refresh rate: usually measured in Hz, comes into play for moving objects. The higher the refresh rate, the more readings per second the sensor receives. Important information if your sensor is moving at a high speed towards a stationary object.
- Range: The range is a distance (from minimum to maximum) in which a sensor can provide accurate readings.
| Sharp GP2Y0A21YK0F | Specifications: |
 |
|
| Sharp GP2Y0A41SK0F | Specifications: |
 |
|
TF Mini LiDAR
|
Specifications:
|
 |
|
LIDAR-Lite v3
|
Specifications:
|
 |
|
LIDAR-Lite v3HP
|
Specifications:
|
 |
|
HRLV-MaxSonar-EZ1
|
Specifications:
|
 |
|
HRLV-MaxSonar-E4
|
Specifications:
|
 |
|
HRXL-MaxSonar-WR
|
Specifications:
|
 |
|
LV-MaxSonar-EZ0
|
Specifications:
|
 |
|
HC-SR04
|
Specifications:
|
 |
|
| Distance sensor VL53L1X
|
Specifications:
|
 |
|
| Distance Sensor RFD77402
|
Specifications:
|
 |
|
| TOF VL6180
|
Specifications:
|
 |
|
Didn't find a sensor you were looking for? In our category"Distance/Proximity" we have a large selection of different distance sensors!
