Description
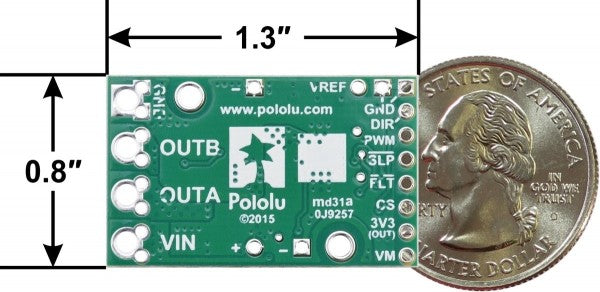
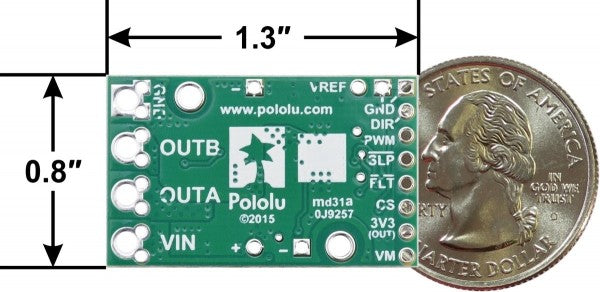
Dieser diskrete MOSFET-H-Brücken-Motortreiber ermöglicht die bidirektionale Ansteuerung eines bürstenbehafteten Hochleistungs-Gleichstrommotors. Die kleine Platine mit den Abmessungen 1,3″ x 0,8″ unterstützt einen breiten Spannungsbereich von 6,5 V bis 40 V und ist so effizient, dass sie ohne Kühlkörper einen Dauerstrom von 13 A liefern kann. Zu den weiteren Merkmalen dieses Treibers der zweiten Generation (G2) gehören ein Verpolungsschutz sowie grundlegende Funktionen zur Strommessung und Strombegrenzung.
Merkmale:
- H-Brücken-Motortreiber: kann einen bidirektionalen bürstenbehafteten Gleichstrommotor ansteuern
- Betriebsspannung: 6,5 V bis 40 V (absolutes Maximum)
- Ausgangsstrom: 13 A Dauerstrom
- Eingänge kompatibel mit 1,8-V-, 3,3-V- und 5-V-Logik
- PWM-Betrieb bis zu 100 kHz
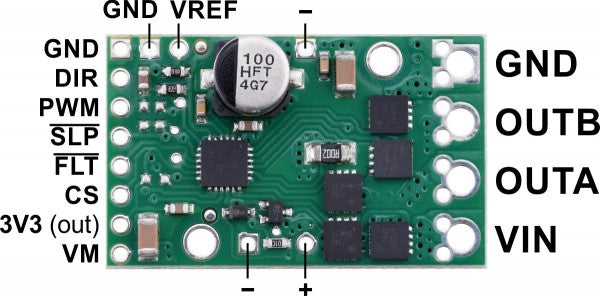
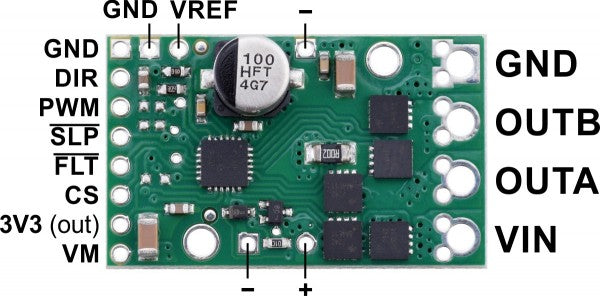
- Strommessausgang proportional zum Motorstrom (ca. 40 mV/A; nur aktiv, solange die H-Brücke den Motor ansteuert)
- Aktive Strombegrenzung (Chopping) mit einem Standardschwellenwert von 30 A (kann nach unten angepasst werden)
- Sperrspannungsschutz
- Unterspannungsabschaltung
- Kurzschlussschutz
- Abmessungen: 1,3″ × 0,8″, Gewicht 3,3 g
- Zwei 0,086″-Befestigungslöcher für #2- oder M2-Schrauben
Spezifikationen:
- Motorkanäle: 1
- Mindestbetriebsspannung: 6,5 V
- Maximale Betriebsspannung: 40 V
- Dauerstrom pro Kanal: 13 A
- Strommessung: 0,04 V/A
- Maximale PWM-Frequenz: 100 kHz
- Mindestlogikspannung: 1,8 V
- Maximale Logikspannung: 5,5 V
- Verpolungsschutz?: Ja
Dokumente:
Encrypted payment
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.
Customs tariff number:
Country of origin:
This depends on where you are located. Once the order has been handed over to UPS, the delivery time in Germany is approx. 2-3 days, within Europe approx. 1 week.
We dispatch our articles with our shipping partner UPS.
If we have not yet answered your question, you can contact us and we will get back to you as soon as possible.