Description
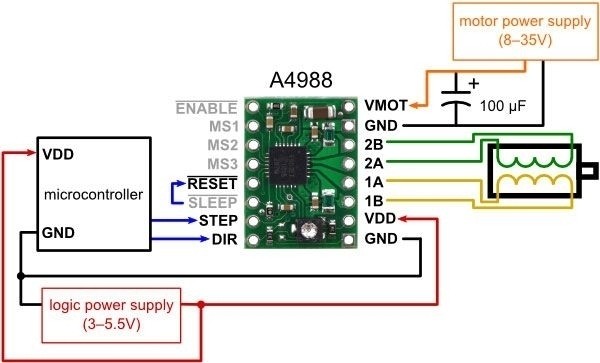
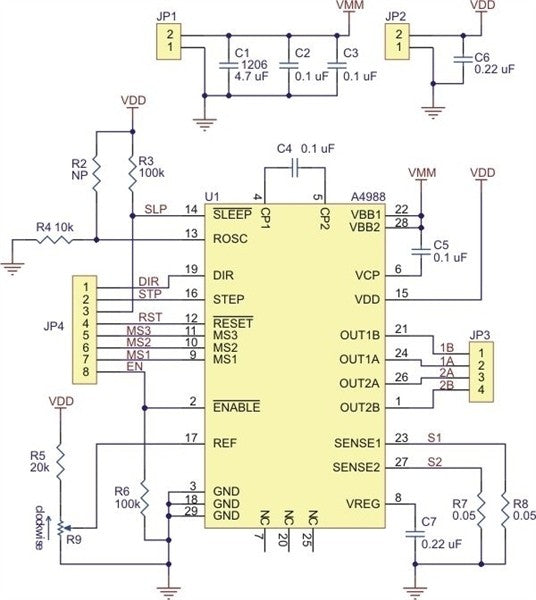
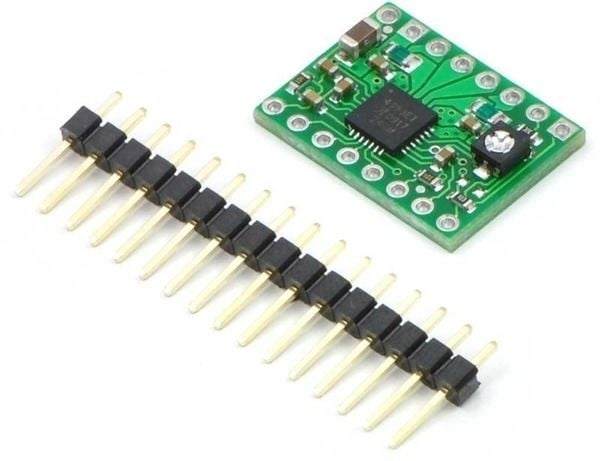
Pololu 1182 breakout board for the Allegro A4988 bipolar microstepping motor driver with adjustable current limiting, overcurrent and overtemperature protection, and five different microstepping resolutions (down to 1/16 step).
It operates at 8 V to 35 V and can deliver up to approximately 1 A per phase without a heat sink or ventilation (2 A per coil is possible with sufficient additional cooling).
Comes with 0.1" pin headers, which are not soldered.
Specifications:
- Minimum operating voltage: 8 V
- Maximum operating voltage: 35 V
- Continuous current per phase: 1 A
- Maximum current per phase: 2 A
- Minimum logic voltage: 3 V
- Maximum logic voltage: 5.5 V
- Microstep resolutions: full, 1/2, 1/4, 1/8 and 1/16
- Reverse polarity protection: No
- Header pins soldered: No
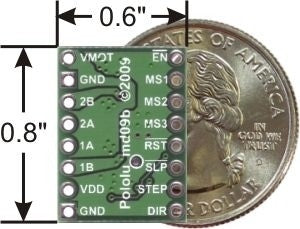
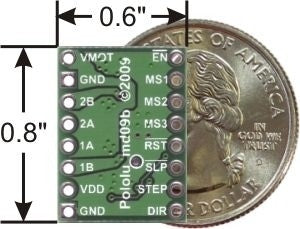
- Size: 1,524 cm x 2,032 cm
- Weight: 1.3 g
Links:
Encrypted payment
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.
Customs tariff number:
Country of origin:
This depends on where you are located. Once the order has been handed over to UPS, the delivery time in Germany is approx. 2-3 days, within Europe approx. 1 week.
We dispatch our articles with our shipping partner UPS.
If we have not yet answered your question, you can contact us and we will get back to you as soon as possible.