


Description
This kit includes a round printed circuit board (PCB) with holes spaced on a 0.100" grid, one extended 2×7 male header, two extended 1×2 male headers, one 2×7 female header, two 1×2 female headers, four 7/8" nylon spacers, four 1-1/4" screws, and four nuts.

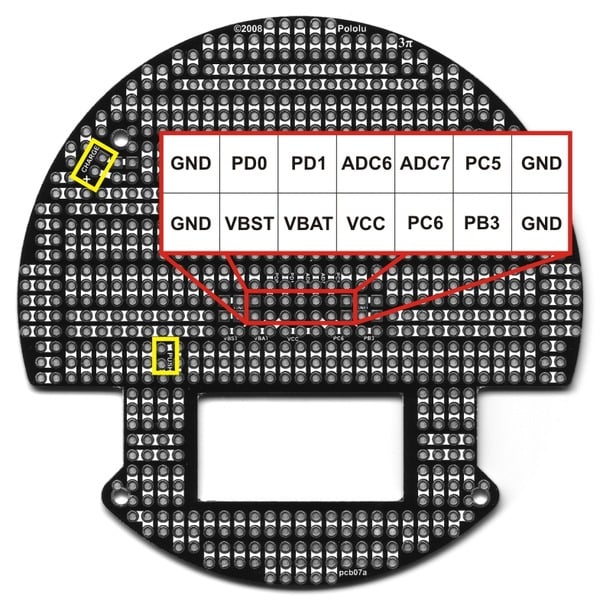
The expansion PCB matches diameter of the 3pi chassis and mounts just above the tops of the wheels using the four included screws and spacers. Once assembled, the PCB has electrical connections to the base that allow you interface your own electronics with the 3pi robot, which is sold separately. These connections give you access to the ATmega168?s free/jumpered pins, as well as to the three on-board voltages: VBAT (battery voltage), VCC (regulated 5 V), and VBST (regulated 9.25 V that is supplied to the motors). Additionally, the expansion PCB connects to the base?s power button and battery charge port, allowing you to add your own power buttons and charge ports.
This expansion kit?s PCB has cutouts that allow you to view the LCD below and access the power button, reset button, and ISP programming header. If you want additional I/O lines or extra prototyping space and you do not need the LCD, please consider the version of the expansion kit without cutouts, which replaces the LCD. For a more advanced expansion kit, please consider the m3pi expansion kit, which lets you turn your 3pi robot into an m3pi robot.


The expansion PCB is designed to provide plenty of prototyping space for your components. It has room for one 0.6" 40-pin DIP (dual in-line package) component, such as the ATmega32 in the picture below, or for numerous smaller DIP components. The prototyping space extends all the way to the edge of the PCB, allowing you convenient points to mount a variety of sensors such as bumper switches and range-finders. The silkscreen shows how the pads are connected; the electrical connections are on the bottom side. You can cut the copper traces on that bottom side (with a sharp knife or a small rotary tool cutoff wheel) if some of the pre-made connections interfere with your desired layout.

The two unused I/O lines on the 3pi?s microcontroller are its serial transmit and receive lines. This means that you can add a second microcontroller or microcontroller board, such as a Baby Orangutan, Basic Stamp, or Arduino Nano, to the expansion PCB. This second microcontroller would deal with all of the sensors and additional hardware on the expansion PCB and control the base via serial commands. We have released a serial slave program for the 3pi base that turns it into a serially controlled platform that can be driven at the whim of another microcontroller.
Assembly
The supplied header pins allow you to establish all of the necessary electrical connections between the expansion PCB and the 3pi base. We recommend that you fully assemble the 3pi and its expansion kit before you solder anything. This will ensure that once everything is soldered in, the expansion platform will align properly with the base. We suggest that you assemble your expansion kit in the following order:
1) Place the 2×7 female header and one of the 2×1 female headers into the proper holes in the 3pi base as shown below (see the yellow rectangles).

2) Insert the long ends of the 2×7 and one 2×1 extended male header into these female headers, and insert an extended 2×1 male header into the battery charge port. Place the expansion PCB so the tops of these male headers seat in the proper places, as marked by the rectangles in the picture below. Note that the expansion PCB mounts with the silkscreen facing up.
3) Slip a nylon spacer between the base and the expansion PCB so that it lines up with the mounting hole on the base. Insert a screw from the underside of the base up through the base?s mounting hole, the spacer, and the mounting hole on the expansion board. Holding the head of the screw against the base, twist the nut onto the other side, but don?t tighten it all the way. Repeat this process for the three remaining screws, and then tighten them together so that the expansion PCB is aligned well with the base.
4) With the screws holding everything in place, you can now solder the female headers to the base and the male headers to the expansion PCB. Once everything is soldered in, you can remove the screws and pull the expansion PCB off of the base; it should look like the one in the picture below.

After assembly you will have a single 2×1 female header left over. You can use this to create your own battery charge port on the expansion PCB.
Note: This product is a kit designed to augment the 3pi robot (sold separately). Assembly of this kit requires soldering.
Documents:
Encrypted payment
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.
Additional information
Customs tariff number:
Country of origin:
This depends on where you are located. Once the order has been handed over to UPS, the delivery time in Germany is approx. 2-3 days, within Europe approx. 1 week.
We dispatch our articles with our shipping partner UPS.
If we have not yet answered your question, you can contact us and we will get back to you as soon as possible.
You might also like
Recently viewed