Beschreibung
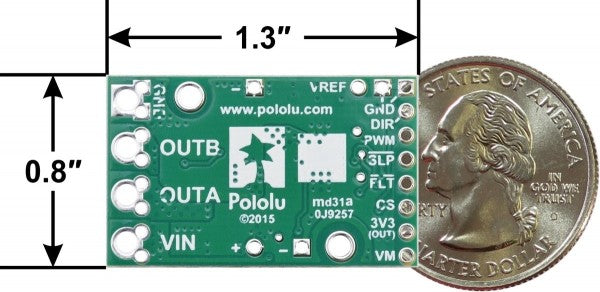
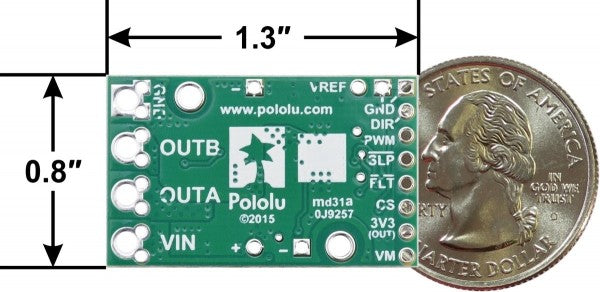
Dieser diskrete MOSFET-H-Brücken-Motortreiber ermöglicht die bidirektionale Ansteuerung eines bürstenbehafteten Hochleistungs-Gleichstrommotors. Die kleine Platine mit den Abmessungen 1,3″ x 0,8″ unterstützt einen breiten Spannungsbereich von 6,5 V bis 40 V und ist so effizient, dass sie ohne Kühlkörper einen Dauerstrom von 13 A liefern kann. Zu den weiteren Merkmalen dieses Treibers der zweiten Generation (G2) gehören ein Verpolungsschutz sowie grundlegende Funktionen zur Strommessung und Strombegrenzung.
Merkmale:
- H-Brücken-Motortreiber: kann einen bidirektionalen bürstenbehafteten Gleichstrommotor ansteuern
- Betriebsspannung: 6,5 V bis 40 V (absolutes Maximum)
- Ausgangsstrom: 13 A Dauerstrom
- Eingänge kompatibel mit 1,8-V-, 3,3-V- und 5-V-Logik
- PWM-Betrieb bis zu 100 kHz
- Strommessausgang proportional zum Motorstrom (ca. 40 mV/A; nur aktiv, solange die H-Brücke den Motor ansteuert)
- Aktive Strombegrenzung (Chopping) mit einem Standardschwellenwert von 30 A (kann nach unten angepasst werden)
- Sperrspannungsschutz
- Unterspannungsabschaltung
- Kurzschlussschutz
- Abmessungen: 1,3″ × 0,8″, Gewicht 3,3 g
- Zwei 0,086″-Befestigungslöcher für #2- oder M2-Schrauben
Spezifikationen:
- Motorkanäle: 1
- Mindestbetriebsspannung: 6,5 V
- Maximale Betriebsspannung: 40 V
- Dauerstrom pro Kanal: 13 A
- Strommessung: 0,04 V/A
- Maximale PWM-Frequenz: 100 kHz
- Mindestlogikspannung: 1,8 V
- Maximale Logikspannung: 5,5 V
- Verpolungsschutz?: Ja
Dokumente:
Verschlüsselte Zahlung
Ihre Zahlungsinformationen werden sicher verarbeitet. Wir speichern keine Kreditkartendaten und haben auch keinen Zugang zu Ihren Kreditkartendaten.
Zolltarifnummer:
Herkunftsland:
Das hängt davon ab, wo Sie sich befinden. Nach Übergabe der Bestellung an UPS beträgt die Lieferzeit in Deutschland ca. 2-3 Tage, innerhalb Europas ca. 1 Woche.
Wir versenden unsere Artikel mit unserem Versandpartner UPS.
Wenn wir Ihre Frage noch nicht beantwortet haben, können Sie uns kontaktieren, und wir werden uns so schnell wie möglich bei Ihnen melden.