


Beschreibung
Das Arduino Motor-Shield basiert auf dem L298 (Datenblatt), einem Brückentreiber für die Steuerung von induktiven Lasten wie Relays, Magnete, Gleichstrom- und Schrittmotoren. Das Arduino Motor-Shield ermöglicht die Steuerung von zwei Gleichstrommotoren, wobei die Drehzahl und die Drehrichtung unabhängig von beiden Motoren kontrolliert werden kann. Ebenfalls möglich ist die Messung des Stromverbrauchs jedes einzelnen Motors. Das Shield ist kompatibel mit denTinkerKit, das heisst es können schnell und einfach Projekte durch das Anschliessen eines TinkerKit-Moduls erstellt werden.
Zusammenfassung
| Betriebsspannung | 5V bis 12V |
| Motorcontroller | L298P, Steuert zwei Gleichstrom- oder einen Schrittmotor |
| Max. Strom | 2A pro Kanal oder 4A maximal (über externe Stromversorgung) |
| Spannungsmessung | 1.65V/A |
| Unabhängige Anhalte- und Bremsfunktionen |
Schema & Design-Referenzen
EAGLE-Dateien: arduino_MotorShield_Rev3-reference-design.zip
Schema: arduino_MotorShield_Rev3-schematic.pdf
Strom- und Spannungsversorgung
Das Arduino Motor-Shield muss über eine externe Quelle mit Spannung versorgt werden. Der integrierte L298-IC auf dem Shield besitzt zwei Eingänge für die Spannungsversorgung. Dabei ist einer für die Logik, der andere für den Betrieb der Motoren vorgesehen. Die Verwendung von unabhängigen Eingängen ist durchaus sinnvoll, da der Stromverbrauch eines Motors in der Regel die maximale Stromabgabe eines USB-Ports übersteigt.
Die externe Spannungsversorgung (nicht USB) kann dabei über ein passendes Netzteil oder über Batterien realisiert werden. Der passende Adapter kann dazu in den 2,1mm-Anschluss (Pluspol innen) gesteckt werden, welcher auf dem mit dem Motor-Shield verbundenen Arduino-Board montiert ist. Alternativ kann die externe Spannungsversorgung auch direkt an den Motor-Shield über Schraubklemmen angeschlossen werden.
Damit mögliche Beschädigungen am Arduino-Board vermeiden werden können, empfiehlt es sich, eine externe Spannungsversorgung mit einer Spannung zwischen 7 und 12V zu verwenden. Sollte der angeschlossen Motor mehr als 9V benötigen, dann sollte der Stromkreis zum Arduino-Board unterbrochen werden. Dazu wird der "Vin Connect"-Jumper auf der Rückseite des Shields getrennt. Die maximale Eingangsspannung an den Schraubklemmen des Motor Shields beträgt 18V.
Die Versorgungsanschlüsse sind folgendermassen bezeichnet:
- Vin auf der Schraubklemme bezeichnet die Versorgungsspannung des Motors. Eine angeschlossene externe Spannungsversorgung versorgt ebenfalls das Arduino-Board mit Spannung. Durch Trennung des "Vin Connect"-Jumpers wird die Spannungsversorgung ausschliesslich für den Motor verwendet.
- GND auf der Schraubklemme bezeichnet den Ground-Anschluss.
Das Motor-Shield verträgt maximal 2A pro Kanal und insgesamt höchstens 4A.
Eingänge und Ausgänge
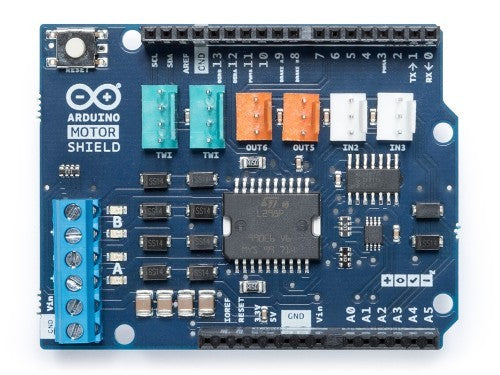
Das Shield verfügt über zwei unabhängige Kanäle, welche mit A und B bezeichnet sind. Jeder Kanal benötigt dabei 4 Anschlüsse auf dem Arduino-Board, also insgesamt 8 Pins. Die Kanäle ermöglichen das unabhängige Steuern von zwei Gleichstrommotoren oder einem unipolaren Schrittmotor.
Die Anschlüsse des Motor-Shields, aufgeteilt nach Kanälen sind in der folgenden Tabelle ersichtlich:
| Funktion | Pins Kanal A | Pins Kanal B |
| Drehrichtung | D12 | D13 |
| PWM | D3 | D11 |
| Bremsen | D9 | D8 |
| Strommessung | A0 | A1 |
Falls die Funktionen Bremsen und Strommessung nicht benötigt werden, können die entsprechenden Pins freigegeben werden, in dem die Jumperverbindung auf der Rückseite des Shields getrennt werden.
Die zusätzlichen Anschlüsse auf dem Shield werden nachfolgen beschrieben:
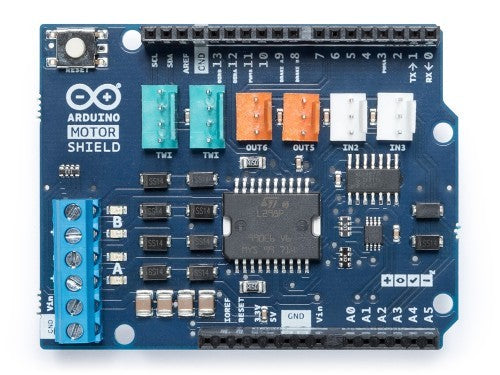
- Screw terminal ermöglicht den Anschluss der Motoren und der externen Spannungsversorgung.
- 2 TinkerKit connectors für zwei analoge Eingänge (in weiss), verbunden mit Pin A2 und A3.
- 2 TinkerKit connectors für zwei analoge Ausgänge (in orange, in der Mitte), verbunden mit den PWM-Ausgängen auf Pin D5 und D6.
- 2 TinkerKit connectors für das TWI-Interface (in weiss, mit 4 Anschlüssen), einer für den Eingang und einer für den Ausgang.
Motors connections
Brushed DC motor. Es können zwei Gleichstrommotoren angeschlossen werden. Dazu müssen die beiden Kabel des Motors in die (+) und in die (-) Schraubklemme des jeweiligen Kanals gesteckt werden. Die Drehrichtung wird kontrolliert, in dem ein HIGH oder ein LOW auf die DIR A und DIR B Pins gegeben wird. Die Drehgeschwindigkeit wird gesteuert, in dem das PWM-Signal auf dem PWM A and PWM B verändert wird. Werden die beiden Anschlüsse Brake A und Brake B auf HIGH gesetzt, dann wird der Motor effektiv gebremst, anstatt dass er einfach durch Unterbrechung der Spannungsversorgung ausläuft. Der Strom, welcher durch die beiden Motoren fliesst kann gemessen werden, indem dieSNS0 und SNS1 Pins ausgelesen werden. Jeder der beiden Kanäle liefert auf den beiden Pins eine Spannung, die proportional zum gemessenen Strom ist. Die Funktion analogRead() auf den analogen Eingängen A0 und A1 ermöglicht die Erfassung der Spannung. Dabei ist die maximale Spannung auf 3,3V kalibriert, was einem maximalen Strom von 2A entspricht.
Physikalische Eigenschaften
Die Abmessung des Motor-Shields sind 2,7 auf 2,1 Inches, bzw. 6,7 auf 5,2 cm. Das Shield besitzt vier Bohrlöcher, damit es auf einer Oberfläche oder in einem Gehäuse befestigt werden kann. Hinweis: Der Abstand zwischen dem digitalen Pin 7 und 8 ist 0.16 Inches bzw. 4mm und nicht 0.1 Inches bzw. 2.54 mm wie bei den anderen Pins.
Verschlüsselte Zahlung
Ihre Zahlungsinformationen werden sicher verarbeitet. Wir speichern keine Kreditkartendaten und haben auch keinen Zugang zu Ihren Kreditkartendaten.
Zolltarifnummer:
Herkunftsland:
Das hängt davon ab, wo Sie sich befinden. Nach Übergabe der Bestellung an UPS beträgt die Lieferzeit in Deutschland ca. 2-3 Tage, innerhalb Europas ca. 1 Woche.
Wir versenden unsere Artikel mit unserem Versandpartner UPS.
Wenn wir Ihre Frage noch nicht beantwortet haben, können Sie uns kontaktieren, und wir werden uns so schnell wie möglich bei Ihnen melden.